我院龚华军教授指导的博士生李伟同学,以第一作者和共同通讯作者身份发表的学术论文“AADS: Augmented Autonomous Driving Simulation Using Data-Driven Algorithms”,于2019年3月27日刊登在《科学》杂志子刊《科学·机器人学》(Science·Robotics),该刊编辑在杂志主页对论文进行了推荐。该研究成果介绍了一种增强现实的自动驾驶仿真系统,它可自动创建逼真的道路场景,为自动驾驶车辆提供更为可靠且廉价的实验室模拟方法,可大规模用于训练和测试评估自动驾驶系统的路径规划和决策算法。《科学·机器人学》旨在传播机器人与人工智能相关领域的代表性研究成果,平均每期刊出不多于4篇的研究类文章。
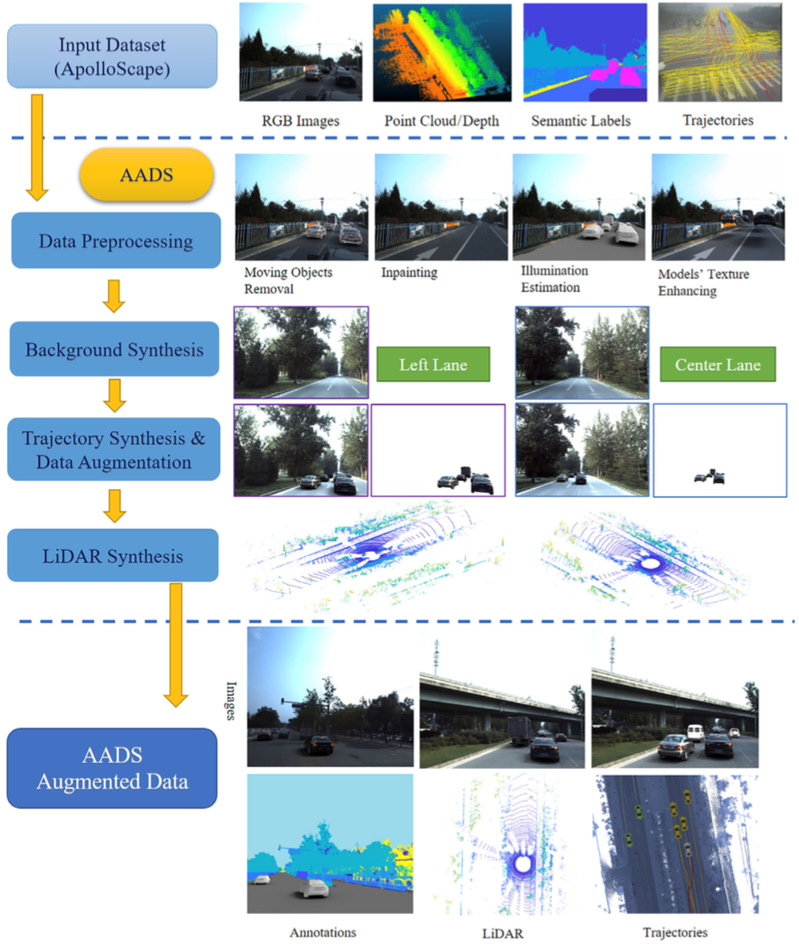
AADS 系统的输入、处理流程和输出。上:真实采集的数据集输入。虚线之间显示了 AADS 仿真系统的主要处理流程,包含数据预处理、虚拟背景合成、轨迹合成、移动目标的增强和 LiDAR 模拟。下:AADS 系统的输出,包含合成的 RGB 图像、LiDAR 点云和带有标注信息的车辆行驶轨迹。
李伟同学曾于2015年9月至2017年8月间由国家留学基金委(CSC)公派赴美国肯塔基大学联合培养2年。2019年3月25日,李伟同学的博士学位论文《三维物体几何、表观和形变重建关键技术研究》,顺利通过了博士学位论文答辩,答辩委员会一致建议授予其工学博士学位,并一致推荐参加校优秀博士学位论文评选。
